
Real-Time Robotics Compute:
From Perception to Action
We build robust, real-time compute solutions powering industrial robots, unmanned vehicles, and automated systems.
High-bandwidth sensor capture (camera, IMU, LiDAR, industrial I/O)
FPGA-accelerated perception and AI/ML inference pipelines
Deterministic sensor fusion, control loops, and safety-critical logic
Field-ready platforms for robotic controllers and autonomous machines
PERCEPTION-TO-ACTUATION SYSTEM STACK
Complete Compute and Control Stack for Robotics
Processing from raw sensors to perception, decision-making, and actuation.
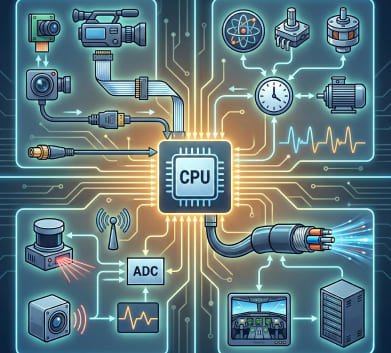
Sensor Interfaces
- Multi-camera (MIPI/HDMI/SDI)
- Time-synchronized IMU, encoder & motor-sensor inputs
- LiDAR/ToF + RF/JESD ADC-based sensing
- ARINC 818 for high-bandwidth video transport
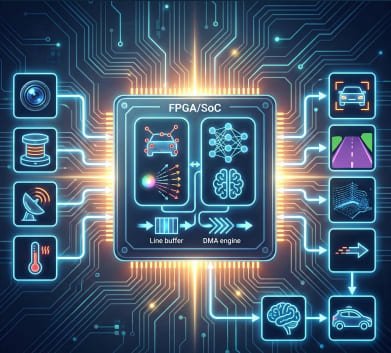
Perception (FPGA/SoC)
- HW-accelerated CV: feature detection, optical flow
- CNN/transformer ML inference
- Low-latency vision pipelines (line buffers, DMA)
- FPGA image stitching & enhancement
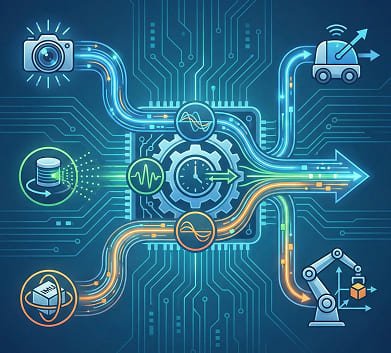
Sensor Fusion
- Kalman/Mahony/Madgwick filters
- Time alignment of high-speed sensor streams
- Pose estimation for AMRs & robotic arms
Planning & Control
- Real-time motion planning (ms-level)
- Motor control via CAN/EtherCAT/FlexRay
- Safety interlocks & bounded-error logic
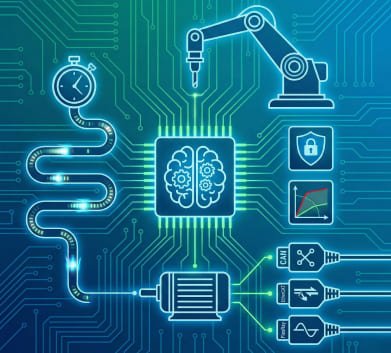
Actuation
- Deterministic actuator commands
- Closed-loop feedback & correction
- Integration with industrial robotics buses

REFERENCE PLATFORMS USED IN ROBOTICS
COTS Platforms for Robotics and Autonomous Systems
Platforms that enable robotics teams to build, test, and deploy autonomous systems efficiently.
Kritin VPX SBC Family (Flagship Robotics Controller)
- 6U VPX single-board computer with Intel-based processing
- High-speed PCIe, Ethernet, and ARINC 818 video support
- Multi-sensor and video ingest with FPGA acceleration
- Deterministic compute for control and perception workloads
- Deployed in robotics controllers, unmanned systems, and mission computers
Avant G70 PCIe Mini Board
- Compact PCIe accelerator based on Lattice Avant FPGA
- Optimized for low-power AI/ML inference at the edge
- PCIe-connected coprocessor for offloading perception tasks
- Suitable for robotic arms, gantries, and compact AMRs
Aquila DAQ Platform
- Scalable FPGA-based data acquisition system
- Multi-channel camera and ADC sensor ingest
- Real-time preprocessing for perception and navigation pipelines
- Used in robotic inspection, sensing, and localization subsystems
ARINC 818 Displays & Video Chain (A-3.1.2)
- High-speed ARINC 818 video transport and processing
- Low-latency visual pipelines for real-time HMIs
- Support for multi-format video input and output
- Applied in teleoperation, monitoring, and robotic display systems
Platform Architectures for Autonomous Machines
Logic Fruit delivered:
- FPGA-based multi-camera ingest (Aquila)
- Real-time IMU + encoder fusion (Kritin SBC)
- ML inference mapped to FPGA fabric
- Sub-10 ms perception → actuation loop
- Safety-certified control path drivers
- Full system-level validation using our verification methodology

Outcome Highlights
- 40% lower end-to-end latency
- Deterministic path planning even under load
- Reduced compute power consumption via FPGA acceleration
- Faster field deployment using COTS platforms

Build Smarter, Faster Autonomous Systems
Partner with our experts to design, validate, and deploy real-time perception, compute, and control platforms for robotics and autonomous machines.